
Zeromq Message深入理解
- base API
- Multiple Sockets
- Multipart Messages
- Unix Signal caughtion
- Multithreading with ZeroMQ
- Signaling Between Threads
- Pub-sub Node Coordination
- Pub-Sub Message Envelopes
- High-Water Marks
- Missing Message Problem Solver
base API
Initialise a message:
zmq_msg_init()
zmq_msg_init_size()
zmq_msg_init_data().
Sending and receiving a message:
zmq_msg_send()
zmq_msg_recv()
Release a message:
zmq_msg_close().
Access message content:
zmq_msg_data()
zmq_msg_size()
zmq_msg_more()
Work with message properties
zmq_msg_get()
zmq_msg_set()
Message manipulation
zmq_msg_copy()
zmq_msg_move()
Multiple Sockets
类似 IO 复用,zeromq 也有 poll 机制,可方便同时读写多个 socket.
//
// Reading from multiple sockets in C++
// This version uses zmq_poll()
//
// Olivier Chamoux <olivier.chamoux@fr.thalesgroup.com>
#include "zhelpers.hpp"
int main (int argc, char *argv[])
{
zmq::context_t context(1);
// Connect to task ventilator
zmq::socket_t receiver(context, ZMQ_PULL);
receiver.connect("tcp://localhost:5557");
// Connect to weather server
zmq::socket_t subscriber(context, ZMQ_SUB);
subscriber.connect("tcp://localhost:5556");
subscriber.setsockopt(ZMQ_SUBSCRIBE, "10001 ", 6);
// Initialize poll set
zmq::pollitem_t items [] = {
{ receiver, 0, ZMQ_POLLIN, 0 },
{ subscriber, 0, ZMQ_POLLIN, 0 }
};
// Process messages from both sockets
while (1) {
zmq::message_t message;
zmq::poll (&items [0], 2, -1);
if (items [0].revents & ZMQ_POLLIN) {
receiver.recv(&message);
// Process task
}
if (items [1].revents & ZMQ_POLLIN) {
subscriber.recv(&message);
// Process weather update
}
}
return 0;
}
Multipart Messages
消息组装,一个 multipart message 可以由多个 frame 来完成发送和接收.
发送时,最后一个 message part 发送完成时,整个 multipatr message 才开始发送;
接收时,第一个 message part 可以接收时,整个 multipatr message 实际上都已经接收了,这是很合理的.
Send:
zmq_msg_send (&message, socket, ZMQ_SNDMORE);
…
zmq_msg_send (&message, socket, ZMQ_SNDMORE);
…
zmq_msg_send (&message, socket, 0);
Receive:
while (1) {
zmq_msg_t message;
zmq_msg_init (&message);
zmq_msg_recv (&message, socket, 0);
// Process the message frame
…
zmq_msg_close (&message);
if (!zmq_msg_more (&message))
break; // Last message frame
}
Unix Signal caughtion
用 try-catch 捕获,然后基于正常注册的 signal hander 该咋处理咋处理.
try {
socket.recv (&msg);
}
catch(zmq::error_t& e) {
std::cout << "W: interrupt received, proceeding…" << std::endl;
}
或者判断返回的 return code == EINTER,这个和 unix 保持一致.
Multithreading with ZeroMQ
首先这里的 multithreading 指的是 server.
值得一提的是,Zeromq 的多线程是不使用任何同步原语的高效实现.作者的比喻也是异常生动:要真正的同步编程,就不要有任何共享的状态,否则就像2个醉汉抢1杯啤酒,他们必有一架干,酒桌上的啤酒越多,架就干的越多...
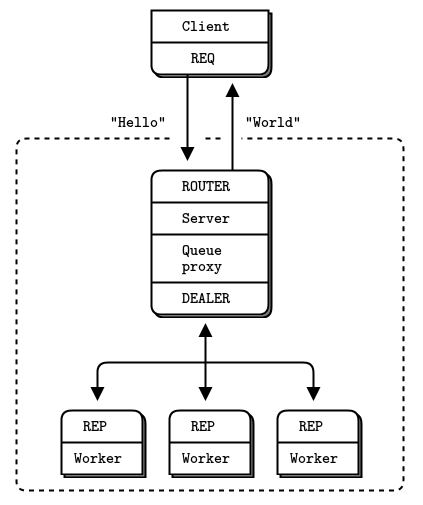
每个 worker 都是一个单线程,线程中不要共享数据.
DEALER 和 REP 是 inproc,即进程内的跨线程.
DEALER 把 task 分配给 REP(server),无需同步原语,由一定的策略决定.
Signaling Between Threads
线程间要同步通讯怎么办呢?就像update->scale->rotate->convert->send那样的 pipeline 线程流程?答案是PARI sockets.(个人怀疑这个能比同步原语快?)
import threading
import zmq
import time
context = zmq.Context()
def step1(contexts=None):
ctx = contexts or zmq.Context.instance()
sender = context.socket(zmq.PAIR)
sender.bind("inproc://b1")
time.sleep(1)
sender.send(b'origin stuff')
pass
def step2(contexts=None):
receiver = context.socket(zmq.PAIR)
receiver.connect("inproc://b1")
msg = receiver.recv_multipart()
print("Got from b1, ", msg)
time.sleep(1)
sender = context.socket(zmq.PAIR)
sender.bind("inproc://b2")
sender.send(b'scaling')
pass
def step3(contexts=None):
receiver = context.socket(zmq.PAIR)
receiver.connect("inproc://b2")
msg = receiver.recv_multipart()
print("Got from b2, ", msg)
time.sleep(1)
sender = context.socket(zmq.PAIR)
sender.bind("inproc://b3")
sender.send(b'converting')
pass
def step4(contexts=None):
ctx = contexts or zmq.Context.instance()
receiver = context.socket(zmq.PAIR)
receiver.connect("inproc://b3")
msg = receiver.recv_multipart()
print("Got from b3, ", msg)
time.sleep(1)
print('things done')
pass
if __name__ == '__main__':
t1 = threading.Thread(target=step1, args=[context])
t2 = threading.Thread(target=step2, args=[context])
t3 = threading.Thread(target=step3, args=[context])
t4 = threading.Thread(target=step4, args=[context])
t1.start()
t2.start()
t3.start()
t4.start()
t1.join()
t2.join()
t3.join()
t4.join()
pass
Pub-sub Node Coordination
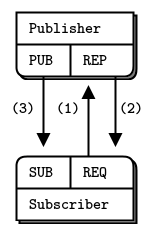
node 可以理解为一个网络节点,zeromq 中的 socket,proxy,都是 node.如果 node 之间需要同步些消息(就像上面的 threadh 之间做的),用 PAIR 就不合适了,因为 thread 是一直运行在那的,而 node 在网络里,可能随时拿掉,又随时连上.
可以用REQ-REP,看一个 Pub-sub 同步(sync pub-sub)的例子,pub 需要知道多少 sub 连上了服务器,于是 sub 通过 req 告知 pub 已连接,pub 等预定数目的 sub 连接才真正的 pub 消息:
Pub-Sub Message Envelopes
其实就是传统 pub-sub 里的 topic,subscriber 可以仅订阅自己感兴趣的 topic,Zeromq 里用envlope.
publisher.send_multipart([b"A", b"We don't want to see this"])
publisher.send_multipart([b"B", b"You want it"])
...
subscriber.setsockopt(zmq.SUBSCRIBE, b"B")
[address, contents] = subscriber.recv_multipart()
根据自己的需要可以扩充协议.
High-Water Marks
在 IO 负载很高时,对 socket 的接收端或发送端(or both)的 IO buffer 行为进行控制,等待数据,丢弃接收数据等等.
Missing Message Problem Solver
下面的流程处理也够详细了:

